[Illustration: FIG. 2.]
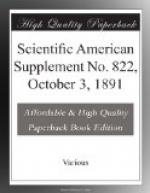
In investigating this subject Mr. Dobrowolsky found that the best theoretical indications for such a system would be a large number of circuits instead of only two or three, each differing from the next one by only a small portion of a wave length; the larger their number the better theoretically. The reason is that with a few currents the resulting magnetism generated in the motor by these currents will pulsate considerably, as shown in Fig. 3, in which the two full lines show the currents differing by 90 degrees. The dotted line above these shows how much the resulting magnetism will pulsate. With two such currents this variation in magnetism will be about 40 degrees above its lowest value. Now, such a variation in the field is undesirable, as it produces objectionable induction effects, and it has the evil effect of interfering with the starting of the motor loaded, besides affecting the torque considerably if the speed should fall slightly below that for synchronism. A perfect motor should not have these faults, and it is designed to obviate them by striving to obtain a revolving field in which the magnetism is as nearly constant as possible.
[Illustration: FIG. 3.]
If there are two currents differing by 90 degrees, this variation of the magnetism will be about 40 per cent.; with three currents differing 60 degrees, about 14 per cent; with six currents differing 30 degrees it will be only about 4 per cent., and so on. It will be seen, therefore, that by doubling the three-phase system the pulsations are already very greatly reduced. But this would require six wires, while the three-phase system requires only three wires (as each of the three leads can readily be shown to serve as a return lead for the other two in parallel). It is to combine the advantages of both that he designed the following very ingenious system. By this system he can obtain as small a difference of phase as desired, without increasing the number of wires above three, a statement which might at first seem paradoxical.
Before explaining this ingenious system, it might be well to call attention to a parallel case to the above in continuous current machines and motors. The first dynamos were constructed with two commutator bars. They were soon found to work much better with four, and finally still better as the number of commutator bars (or coils) was increased, up to a practical limit. Just as the pulsations in the continuous current dynamos were detrimental to proper working, so are these pulsations in few-phased alternating current motors, though the objections manifest themselves in different ways—in the continuous current motors as sparking and in the alternating current motors as detrimental inductive effects.