* * * * *
[Continued from SCIENTIFIC AMERICAN SUPPLEMENT, No. 451, page 7192.]
PLANETARY WHEEL TRAINS.
By Prof. C.W. MacCORD, Sc. D.
IV.
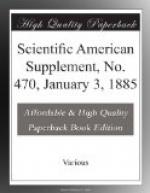
The arrangement of planetary wheels which has been applied in practice to the greatest extent and to the most purposes, is probably that in which the axial motions of the train are derived from a fixed sun wheel. Numerous examples of such trains are met with in the differential gearing of hoisting machines, in portable horse-powers, etc. The action of these mechanisms has already been fully discussed; it may be remarked in addition that unless the speed be very moderate, it is found advantageous to balance the weights and divide the pressures by extending the train arm and placing the planet-wheels in equal pairs diametrically opposite each other, as, for instance, in Bogardus’ horse power, Fig. 31.
[Illustration: PLANETARY WHEEL TRAINS.]
In trains of this description, the velocity ratio is invariable; which for the above-mentioned objects it should be. But the use of a planetary combination enables us to cause the motions of two independent trains to converge, and unite in producing a single resultant rotation. This may be done in two ways; each of the two independent trains may drive one sun-wheel, thus determining the motion of the train-arm; or, the train-arm may be driven by one of them, and the first sun-wheel by the other; then the motion of the second sun-wheel is the resultant. Under these circumstances the ratio of the resultant velocity to that of either independent train is not invariable, since it may be affected by a change in the velocity of the other one. To illustrate our meaning, we give two examples of arrangements of this nature. The first is Robinson’s rope-making machine, Fig. 32. The bobbins upon which the strands composing the rope are wound turn freely in bearings in the frames, G, G, and these frames turn in bearings in the disk, H, and the three-armed frame or spider, K, both of which are secured to the central shaft, S. Each bobbin-frame is provided with a pinion, a, and these three pinions engage with the annular wheel, A. This wheel has no shaft, but is carried and kept in position by three pairs of rollers, as shown, so that its axis of rotation is the same as that of the shaft, S; and it is toothed externally as well as internally. The strands pass through the hollow axes of the pinions, and thence each to its own opening through the laying-top, T, fixed upon S, which completes the operation of twisting them into a rope. The annular wheel, A, it will be perceived, may be driven by a pinion, E, engaging with its external teeth, at a rate of speed different from that of the central shaft; and by varying the speed of that pinion, the velocity of the wheel, A, may be changed without affecting the velocity of S.